Tema 5 Vectores
Los vectores tienen un papel fundamental no solo en matemáticas sino también en la física, la ingeniería e incluso otros campos científicos.
Los vectores en general tienen dos vertientes íntimamente ligadas: la algebraica y la geométrica
En primer lugar, veremos los vectores desde un punto de vista geométrico.
5.1 Definiciones básicas
Sea \(\mathbb{K}\) un cuerpo,
\[X = (x_1,\dots,x_n)\] donde \(x_1,\dots,x_n\in\mathbb{K}\) y \(n\) es la
5.1.1 Vectores fijos
Normalmente los vectores en el plano o en el espacio de tres dimensiones se suelen representar mediante segmentos acabados en una punta de flecha en uno de sus dos extremos
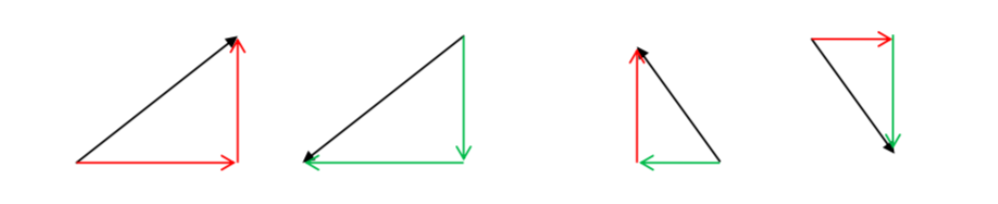
Si denotamos \(P = (p_x,p_y)\) y \(Q = (q_x,q_y)\), entonces las componentes del vector \(\vec{PQ}\) se obtienen restando las coordenadas del punto extremo \(Q\) al punto de origen \(P\)
\[\vec{PQ} = (q_x-p_x,q_y-p_y)\]
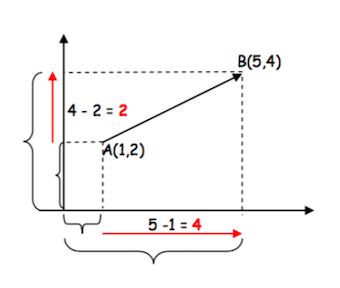
El valor absoluto de las componentes del vector coincide con la de los catetos del triángulo rectángulo formado y tal que el vector sea su hipotenusa:
Ejemplo 1
Consideremos el vector \(\vec{AB}\) donde \(A = (1,2)\) y \(B = (5,4)\)
Sus componentes serán
\[\vec{AB} = (5-1,4-2) = (4,2)\]
En este caso, ambas componentes son positivas
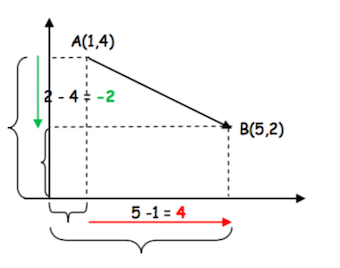
Ejemplo 2
Consideremos el vector \(\vec{AB}\) donde \(A = (1,4)\) y \(B = (5,2)\)
Sus componentes serán
\[\vec{AB} = (5-1,2-4) = (4,-2)\]
En este caso, su componente del eje horizontal será positiva, mientras que la componente del eje vertical será negativa
- Origen. Punto de aplicación donde empieza el vector
- Módulo. Longitud del segmento
- Dirección. Dirección de la recta a la cual pertenece el vector
- Sentido. Lo determina la punta de la flecha del vector
- Sus componentes
- El punto origen
- Las coordenadas del punto origen
- Las coordenadas del punto extremo
Ejemplo 3
Dados \(A = (5,3),\ B = (1,4),\ C = (4,2),\ D = (0,3)\). Los vectores \(\vec{AB}\) y \(\vec{CD}\) son equivalentes a pesar de tener diferentes orígenes y extremos ya que
\[\vec{AB} = (1-5,4-3) = (-4,1)\] \[\vec{CD} = (0-4,3-2) = (-4,1)\]
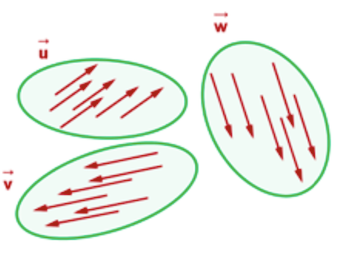
5.1.2 Vectores libres
Como acabamos de ver, todos los vectores fijos equivalentes entre sí tienen las mismas componentes.
En este sentido, es posible establecer una relación de equivalencia correspondiente, el
Este representante define un conjunto infinito de vectores y los representa a todos ellos.
Un vector libre no tiene un origen fijo, sino que se puede ubicar en cualquier punto del espacio.
Cada vector fijo es un representante del vector libre.
En este caso, las coordenadas del punto extremo coinciden numéricamente con las componentes del vector, ya que el punto de origen es \(0 = (0,0)\)
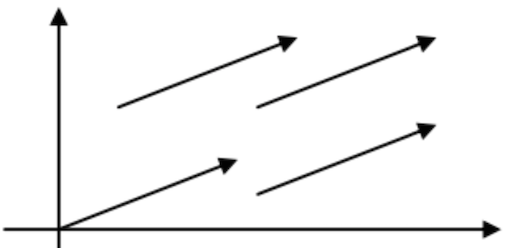
Por tanto, todo vector libre tiene un representante situado en el origen de coordenadas donde el punto extremo tiene las mismas coordenadas que las componentes del vector. Entonces, en este sentido podemos decir
Módulo. Al igual que para los vectores fijos, viene dado por la longitud del segmentoDirección. Viene dado por el ángulo que forma el vector con la dirección positiva del eje \(OX\)Sentido. Viene dado por el ángulo que forma el vector con la dirección positiva del eje \(OX\)
Ejemplo 4
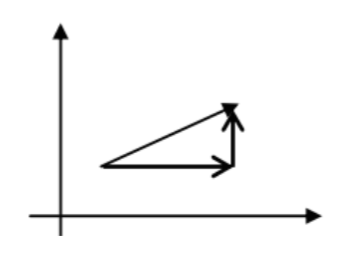
Dado el vector \((7,-5)\), calculemos su módulo, dirección y sentido:
Empecemos por el módulo. Recordemos que el vector, cuyo origen hemos situado en el origen de coordenadas, forma un triángulo rectángulo junto con sus componentes:
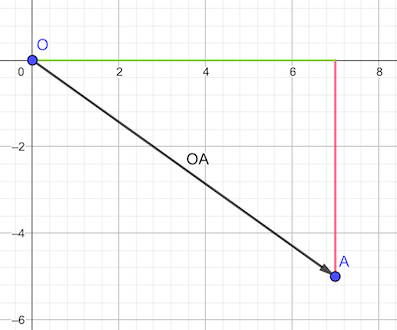
Como conocemos la longitud del segmento verde: 7 unidades; y también la del segmento rojo: 5 unidades, por el Teorema de pitágoras podemos hallar la longitud del segmento \(OA\)
\[|OA|^2 = 7^2+5^2\Rightarrow |OA| = \sqrt{74}\]
Con lo cual, el módulo del vector \((7,-5)\) es \(\sqrt{74}\)
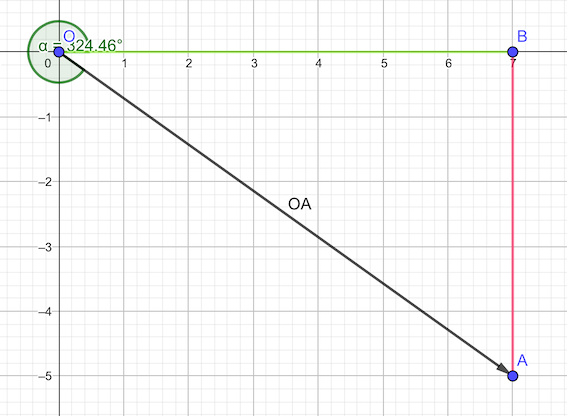
Ahora nos interesa saber el ángulo que forma el vector \((7,-5)\) con el eje \(OX\). Éste se consigue calculando lo siguiente:
Nosotros sabemos que, si denominamos \(\alpha\) al ángulo que estamos buscando, entonces tenemos
\[\tan{(\alpha)} = -\frac{5}{7}\]
Con lo cual, \(\alpha = \arctan{(-\frac{5}{7})} = -0.6202495\) radianes, lo que equivale, haciendo la respectiva conversión, a
\[-0.6202495\ rad\cdot\frac{360º}{2\pi\ rad} = -35.53768º\]
O, equivalentemente, \(360º-35.53768º = 324.4623º\)
5.2 Operaciones con vectores
\[\vec{w} = \vec{u}+\vec{v} = (u_1+v_1,u_2+v_2,\dots,u_n+v_n)\]
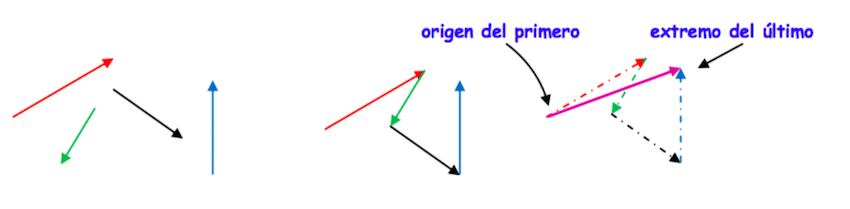
Geométricamente es el vector formado por la diagonal del paralelogramo que tiene los dos vectores sumandos como lados y origen el mismo que ambos:
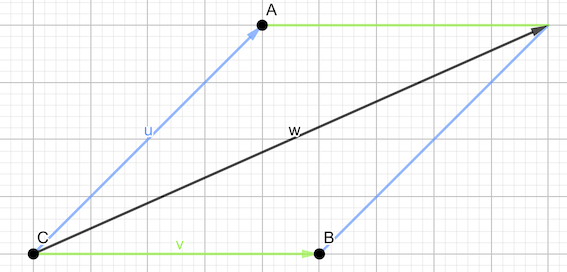
O bien, el vector que une el origen del primer sumando con el extremo del último, habiendo colocado cada origen de los vectores sumandos sobre el extremo del vector sumando precedente
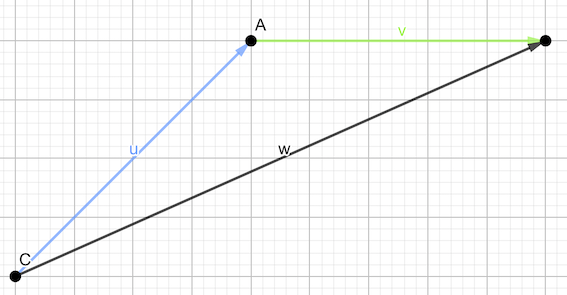
Si se tuviesen que sumar más de dos vectores, resulta más útil la segunda forma que hemos mostrado,
Basta con colocar cada origen de los vectores sumandos sobre el extremo del vector sumando precedente
\[\vec{w} = \vec{u}-\vec{v} = (u_1-v_1,u_2-v_2,\dots,u_n-v_n)\]
Geométricamente, se realiza la suma entre el vector minuendo y el opuesto del sustraendo
En definitiva,
\[\vec{u}-\vec{v} = \vec{w}\Leftrightarrow \vec{v}+\vec{w} = \vec{u}\]
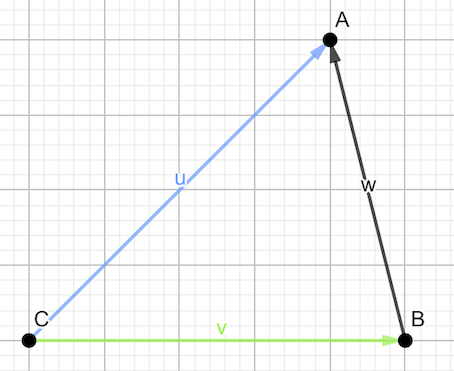
Si se tiene un vector \(\vec{AB}\) obtenido a partir de los puntos \(A\) y \(B\) y se dibujan los vectores \(\vec{OA}\) y \(\vec{OB}\)
Entonces se puede ver como \(\vec{AB},\ \vec{OA},\ \vec{OB}\) forman un triángulo vectorial que cumple las relaciones siguientes:
\[\vec{OA}+\vec{AB}-\vec{OB} = \vec{0}\Leftrightarrow \vec{AB} = \vec{OB}-\vec{OA}\]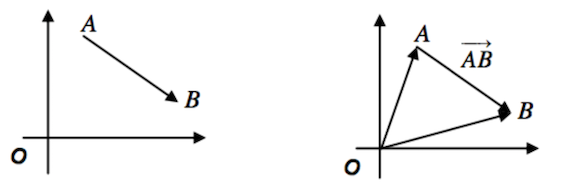
\[\lambda\vec{u} = (\lambda u_1,\lambda u_2,\dots,\lambda u_n)\]
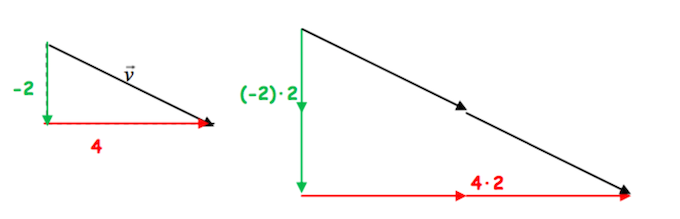
El resultado de multiplicar un escalar \(\lambda \ne 0\) por un vector \(\vec{u}\) es otro vector \(\vec{v}\) de la misma dirección que \(\vec{u}\), de sentido igual o contrario dependiendo del signo del escalar (positivo o negativo, respectivamente) y de módulo igual a \(\lambda\) veces el de \(\vec{u}\)
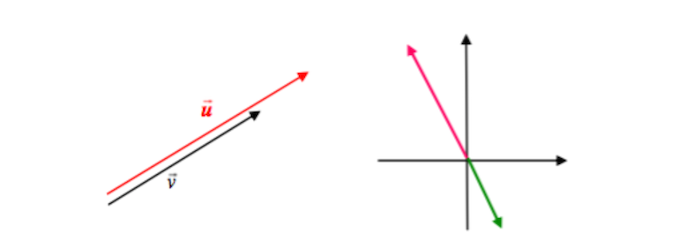
Serán del mismo sentido si \(\lambda>0\) y de sentidos opuestos si \(\lambda<0\)
\[\vec{w} = \sum_{i=1}^k\alpha_i\vec{v}_i = \alpha_1\vec{v}_1+\cdots+\alpha_k\vec{v}_k\]
La combinación lineal de vectores no es una operación nueva, sino que reune en un mismo lugar la suma de vectores y el porducto por escalares.
Para poder hacer combinaciones lineales de vectores, es necesario que todos ellos tengan el mismo número de componentes y el resultado será otro vector de estas mismas características.
Ejemplo 5
¿Es el vector \((2,3)\) combinación lineal de \((3,1)\) y \((-6,-2)\)?
En otras palabras, ¿existen escalares \(a,b\in\mathbb{R}\) tales que \((2,3) = a(3,1)+b(-6,-2)\)?
Si lo pensamos de otra forma, lo anterior equivale a probar si existe solución al sistema de dos ecuaciones y dos incógnitas siguiente
\[\left\{\begin{matrix}3a&-&6b &=& 2\\a&-&2b&=&3\end{matrix}\right.\]
Veamos de qué tipo de sistema se trata haciendo uso del Teorema de Rouché-Frobenius
En primer lugar, \(\det(A) = \begin{vmatrix}3&-6\\1&-2\end{vmatrix} = 0\)
Sin embargo, si sustituimos la segunda columna por el vector de términos independientes, tenemos
\[\begin{vmatrix}3 & 2\\1 & 3 \end{vmatrix} = 7\ne 0\]
Con lo cual, acabamos de ver que \(rg(A) = 1\) mientras que \(rg(A|B) = 2\). Por tanto, el sistema es incompatible, lo que nos lleva a concluir que no, \((2,3)\) no es combinación lineal de \((3,1)\) y \((-6,-2)\)
5.3 Propiedades de las operaciones con vectores
Al definir las operaciones de suma y producto por un escalar, conviene tener presentes las diferencias y similitudes entre ambos.
\[\begin{matrix}f:\mathbb{K}^n\times \mathbb{K}^n&\longrightarrow& \mathbb{K}^n\\ (\vec{u},\vec{v})&\mapsto&\vec{u}+\vec{v}\end{matrix}\]
\[\begin{matrix}f:\mathbb{K}\times \mathbb{K}^n&\longrightarrow& \mathbb{K}^n\\ (\lambda,\vec{u})&\mapsto&\lambda\vec{u}\end{matrix}\]
- Ley asociativa: \[(\vec{u}+\vec{v})+\vec{w} = \vec{u}+(\vec{v}+\vec{w})\]
- Ley conmutativa: \[\vec{u}+\vec{v} = \vec{v}+\vec{u}\]
- Elemento neutro de la suma: \[\vec{u}+\vec{0} = \vec{0}+\vec{u} = \vec{u}\]
- Vector opuesto: \[\vec{u}+(-\vec{u}) = (-\vec{u})+\vec{u} = 0\]
- Ley distributiva del producto por un escalar para la suma de vectores: \[\alpha(\vec{u}+\vec{v}) = \alpha\vec{u}+\alpha\vec{v}\]
- Ley distributiva del producto de un vector por la suma de escalares: \[(\alpha+\beta)\vec{u} = \alpha\vec{u}+\beta\vec{u}\]
- Ley asociativa del producto entre escalares y vectores: \[(\alpha\beta)\vec{u} = \alpha(\beta\vec{u}) = \beta(\alpha\vec{u})\]
- Elemento unidad: \[1\vec{u} = \vec{u}\]
5.4 Estructura euclídea de \(\mathbb{R}^n\)
5.4.1 Producto escalar
\[\langle\vec{u},\vec{v}\rangle = u_1v_1+u_2v_2+\cdots+u_nv_n\]
El producto escalar es la tercera operación básica entre vectores de \(\mathbb{R}^n\).
Del producto escalar es de donde se derivan los conceptos métricos como la ortogonalidad, la norma, el ángulo y se abre camino a múltiples aplicaciones geométricas y físicas del álgebra lineal.
Ejemplo 6
Sean \(\vec{u} = (2,3,0)\) y \(\vec{v} = (-1,3,2)\) dos vectores de \(\mathbb{R}^3\).
Su producto escalar será
\[\langle\vec{u},\vec{v}\rangle = 2\cdot(-1)+3\cdot3+0 = 7\]
- Conmutativa: \(\langle\vec{u},\vec{v}\rangle = \langle\vec{v},\vec{u}\rangle\)
- Distributiva respecto de la suma: \[\langle\vec{u},(\vec{v}+\vec{w})\rangle = \langle\vec{u},\vec{v}\rangle+\langle\vec{u},\vec{w}\rangle\]
- Asociativa y conmutativa entre escalares y vectores: \[\begin{matrix}\langle(\lambda\vec{u}),\vec{v}\rangle = \lambda\langle\vec{u},\vec{v}\rangle\\ \langle\vec{u},(\lambda\vec{v})\rangle = \lambda\langle\vec{u},\vec{v}\rangle\end{matrix}\]
- Si \(\vec{u} = 0\), entonces \(\langle\vec{u},\vec{u}\rangle = 0\)
- Si \(\vec{u}\ne 0\), entonces \(\langle\vec{u},\vec{u}\rangle >0\)
Ejercicio 1
Dados \(\vec{u} = (2,5,-1),\vec{v} = (-3,4,1),\vec{w} = (-1,0,5)\in\mathbb{R}^3\) y \(\lambda = 2\in\mathbb{R}\), comprobar que se cumplen todas las propiedades vistas en la anterior diapositiva
Dados ahora \(\vec{u},\vec{v},\vec{w}\in\mathbb{R}^n\) y \(\lambda\in\mathbb{R}\), demostrar formalmente todas las propiedades de la diapositiva anterior
5.4.2 Norma de un vector
\[||\vec{u}|| = \sqrt{\langle\vec{u},\vec{u}\rangle} = \sqrt{{u}_1^2+{u}_2^2+\cdots+{u}_n^2}\]
- \(||\vec{u}||>0,\ \forall\vec{u}\ne\vec{0}\)
- \(||\lambda\vec{u}|| = |\lambda|||\vec{u}||\)
- Desigualdad triangular: \(||\vec{u}+\vec{v}||\le ||\vec{u}||+||\vec{v}||\)
- Teorema de Pitágoras: \(||\vec{u}+\vec{v}||^2 = ||\vec{u}||^2+||\vec{v}||^2\Leftrightarrow \vec{u}\perp\vec{v}\)
- Desigualdad de Cauchy-Schwarz: \(|\langle\vec{u},\vec{v}\rangle|\le||\vec{u}||\cdot||\vec{v}||\)
5.4.3 Distancia entre dos puntos
\[\langle\vec{u},\vec{v}\rangle = ||\vec{u}||\cdot||\vec{v}||\cdot \cos(\alpha)\]
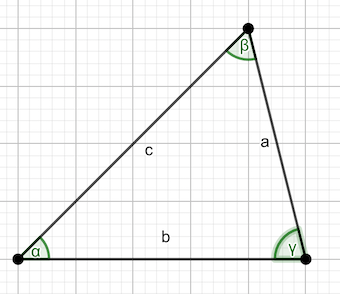
\[a^2 = b^2+c^2-2bc\cos{\alpha}\]
A continuación demostraremos el Teorema que nos da la igualdad
\[ \langle\vec{u},\vec{v}\rangle= ||\vec{u}||\cdot||\vec{v}||\cdot \cos(\alpha)\]
Demostración
Consideremos el vector \(\vec{u}-\vec{v}\). Éste, junto con los vectores \(\vec{u}\) y \(\vec{v}\) formarán un triángulo.
Aplicando \(||\vec{w}||^2 = \langle\vec{w},\vec{w}\rangle\) al vector \(\vec{u}-\vec{v}\), resulta que:
\[||\vec{u}-\vec{v}||^2 = \langle\vec{u}-\vec{v},\vec{u}-\vec{v}\rangle = \langle\vec{u},\vec{u}\rangle+\langle\vec{v},\vec{v}\rangle-2\langle\vec{u},\vec{v}\rangle = ||\vec{u}||^2+||\vec{v}||^2-2\langle\vec{u},\vec{v}\rangle\]
Por otro lado, aplicando el Teorema del coseno al triángulo antes mencionado, tenemos
\[||\vec{u}-\vec{v}||^2 = ||\vec{u}||^2+||\vec{v}||^2-2||\vec{u}||\cdot||\vec{v}||\cdot\cos{(\alpha)}\]
Comparando ambas expresiones, obtenemos que \[\langle\vec{u},\vec{v}\rangle = ||\vec{u}||\cdot||\vec{v}||\cdot\cos{(\alpha)}\]
5.4.4 Ángulo entre dos vectores
\[\cos(\alpha) = \frac{\langle\vec{u},\vec{v}\rangle}{||\vec{u}||\cdot||\vec{v}||}\]
\[\vec{u}\perp\vec{v}\Leftrightarrow \langle\vec{u},\vec{v}\rangle= 0\Leftrightarrow \alpha =\frac{\pi}{2}\]
Ejercicio 2
Encontrar el valor de \(a\) para el cual \((a,0,-1,3)\) sea perpendicular a \((1,7,a-1,2a+3)\)
5.4.5 Desigualdad de Cauchy-Schwarz
Tal y como vimos anteriormente, una de las propiedades de la norma es que el producto escalar en valor absoluto de dos vectores es menor o igual al producto de sus normas
\[|\langle\vec{u},\vec{v}\rangle|\le||\vec{u}||\cdot||\vec{v}||\]
Demostración
A partir de la igualdad \[\cos(\alpha) = \frac{\langle\vec{u},\vec{v}\rangle}{||\vec{u}||\cdot||\vec{v}||}\]
y teniendo en cuenta que el valor absoluto del coseno para cualquier ángulo es siempre menor o igual a 1, obtenemos
\[|\cos(\alpha)| = \left|\frac{\langle\vec{u},\vec{v}\rangle}{||\vec{u}||\cdot||\vec{v}||}\right|\le 1\Leftrightarrow |\langle\vec{u},\vec{v}\rangle|\le||\vec{u}||\cdot||\vec{v}||\]
5.4.6 Proyección Ortogonal
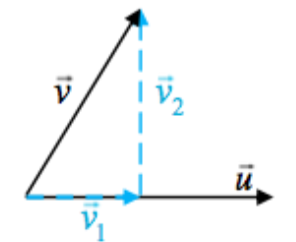
Cálculo de la proyección ortogonal
Se trata de obtener \(P_{\vec{v}}(\vec{u}) = \vec{v}_1\) conociendo los vectores \(\vec{u}\) o \(\vec{v}\)
- Se descompone el vector \(\vec{v} = \vec{v}_1+\vec{v}_2\) donde \(\vec{v}_1||\vec{u}\) y \(\vec{v}_2\perp\vec{u}\) son sus componentes
- \(\vec{v}_1 = \lambda\vec{u}\) por paralelismo
- \(\vec{v}= \lambda\vec{u}+\vec{v}_2\Rightarrow\vec{v}_2 = \vec{v}-\lambda\vec{u}\)
- \(\langle\vec{v}_2,\vec{u}\rangle = 0\Rightarrow\langle(\vec{v}-\lambda\vec{u}),\vec{u}\rangle = 0\) por ortogonalidad
- Ahora, \[\lambda = \frac{\langle\vec{v},\vec{u}\rangle}{\langle\vec{u},\vec{u}\rangle} =\frac{\langle\vec{u},\vec{v}\rangle}{||\vec{u}||^2} \]
Por lo tanto, \[P_{\vec{v}}(\vec{u}) = \vec{v}_1= \lambda\vec{u} = \frac{\langle\vec{u},\vec{v}\rangle}{||\vec{u}||^2}\vec{u} \]
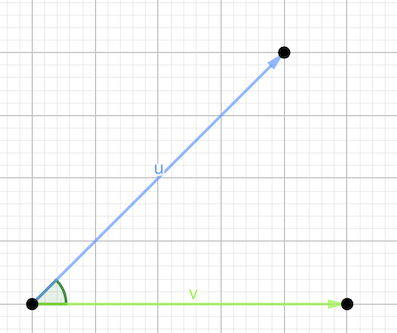
Ejemplo 7
Calcular la proyección ortogonal del vector \(\vec{v} = (1,2)\) sobre \(\vec{u} = (3,1)\)
Por el resultado anterior,
\[P_{\vec{v}}(\vec{u}) = \frac{\langle\vec{u},\vec{v}\rangle}{||\vec{u}||^2}\vec{u} \]
En primer lugar, calculemos
\[\langle\vec{u},\vec{v}\rangle = \langle(1,2),(3,1)\rangle = 5\]
Por otro lado,
\[||\vec{u}||^2 = 10\]
Con lo cual,
\[P_{\vec{v}}(\vec{u}) = \frac{5}{10}\vec{u} = \frac{1}{2}(3,1)\]
5.5 Producto vectorial y producto mixto
5.5.1 Producto vectorial
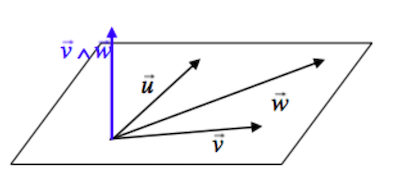
\[\vec{u}\wedge\vec{v} = (u_2v_3-u_3v_2,u_3v_1-u_1v_3,u_1v_2-u_2v_1)\]
\[\langle\vec{u},(\vec{u}\wedge\vec{v})\rangle = 0\] \[\langle\vec{v},(\vec{u}\wedge\vec{v})\rangle = 0\]
Donde se deduce que tanto \(\vec{u}\) como \(\vec{v}\) son ortogonales a su producto vectorial
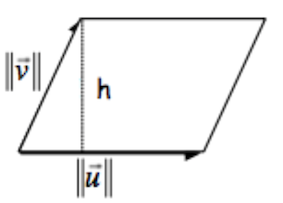
\[||\vec{u}\wedge\vec{v}|| = ||\vec{u}||\cdot h = ||\vec{u}||\cdot||\vec{v}||\cdot\sin(\alpha)\]
\[\vec{u}\wedge\vec{v} = (u_2v_3-u_3v_2,u_3v_1-u_1v_3,u_1v_2-u_2v_1)\] \[\vec{u}\wedge\vec{v} = (u_2v_3-u_3v_2)\vec{i}+(u_3v_1-u_1v_3)\vec{j}+(u_1v_2-u_2v_1)\vec{k}\]
\[\vec{u}\wedge\vec{v} = \begin{vmatrix} \vec{i} & \vec{j}& \vec{k}\\ u_1 & u_2 & u_3\\ v_1 & v_2 & v_3\end{vmatrix}\]
- Propiedad anticonmutativa: \(\vec{u}\wedge\vec{v} = -\vec{v}\wedge\vec{u}\)
- Propiedad distributiva \[\vec{u}\wedge(\vec{v}+\vec{w}) = \vec{u}\wedge\vec{v}+\vec{u}\wedge\vec{w}\\ (\vec{v}+\vec{w})\wedge\vec{u} = \vec{v}\wedge\vec{u}+\vec{w}\wedge\vec{u}\]
- Propiedad asociativa de vectores y escalares \[\alpha(\vec{u}\wedge\vec{v}) = (\alpha\vec{u})\wedge\vec{v}=\vec{u}\wedge\alpha\vec{v}\]
- \(\vec{u}\wedge\vec{0}=\vec{0}\wedge\vec{u} = \vec{0}\)
- \(\vec{u}\wedge\vec{u} = 0\)
5.5.2 Producto mixto
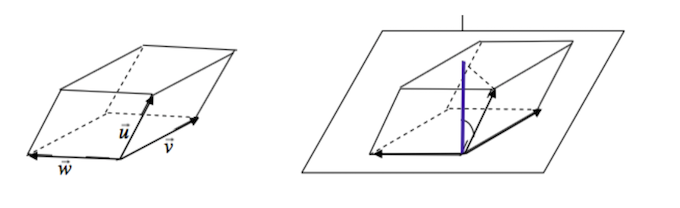
\[\{\vec{u},\vec{v},\vec{w}\} = \langle\vec{u},\vec{v}\wedge\vec{w}\rangle = \begin{vmatrix} u_1 & u_2 & u_3\\ v_1 & v_2 & v_3\\ w_1 & w_2 & w_3\end{vmatrix}\]
Esto ocurre porque si el determinante mostrado anteriormente vale 0, entonces tenemos que una de las filas es combinación lineal de las otras dos.
- \(\{\vec{u},\vec{v},\vec{w}\} = u_1v_2w_3-u_1v_3w_2+u_2v_3w_1-u_2v_1w_3+u_3v_1w_2-u_3v_2w_1\)
- \(\{\vec{u},\vec{v},\vec{w}\} = \{\vec{v},\vec{w},\vec{u}\} = \{\vec{w},\vec{u},\vec{v}\} = -\{\vec{v},\vec{u},\vec{w}\} = -\{\vec{u},\vec{w},\vec{v}\} = -\{\vec{w},\vec{v},\vec{u}\}\)
- Si los tres vectores son coplanarios, entonces \(\{\vec{u},\vec{v},\vec{w}\} = 0\)
- Si \(\{\vec{u},\vec{v},\vec{w}\} = 0\), entonces o algún vector es \(\vec{0}\) o los res vectores son coplanarios