Tema 4 Determinantes
4.1 Definiciones básicas
- si \(n=1\), \(A = (a_{11})\) y entonces \(\det(A) = a_{11}\)
- si \(n>1\), \(\det(A)=a_{11}\alpha_{11}-a_{12}\alpha_{12}+\cdots+(-1)^{n+1}a_{1n}\alpha_{1n}\)
donde \(\alpha_{1i}\) es el determinante de la matriz de orden \(n-1\) que se obtiene en suprimir la primera fila y la columna \(i\)-ésima de la matriz \(A\)
Ejemplo 1
Dada la matriz cuadrada de orden 2, \[A = \begin{pmatrix}a_{11} & a_{12}\\a_{21} & a_{22}\end{pmatrix}\] tenemos que \[\alpha_{11} = \det(a_{22}) = a_{22}\] \[\alpha_{12} = \det(a_{21}) = a_{21}\]
Así pues, el determinante es \[\det(A) = a_{11}\alpha_{11}-a_{12}\alpha_{12} = a_{11}a_{22}-a_{12}a_{21}\]
Ejemplo 2
Dada la matriz cuadrada de orden 3, \[A = \begin{pmatrix}a_{11} & a_{12}&a_{13}\\a_{21}& a_{22} & a_{23}\\ a_{31} & a_{32} & a_{33}\end{pmatrix}\]
El determinante de \(A\) es \[\det(A) = a_{11}\alpha_{11}-a_{12}\alpha_{12}+a_{13}\alpha_{13}\]
donde
\[\alpha_{11} = \begin{vmatrix}a_{22} & a_{23}\\a_{32}&a_{33}\end{vmatrix}\qquad \alpha_{12} = \begin{vmatrix}a_{21} & a_{23}\\a_{31} & a_{33}\end{vmatrix}\qquad \alpha_{13} = \begin{vmatrix}a_{21} & a_{22}\\a_{31} & a_{32}\end{vmatrix}\]
Con lo cual, \[\alpha_{11} = a_{22}a_{33}-a_{23}a_{32};\quad \alpha_{12} = a_{21}a_{33}-a_{23}a_{31};\quad \alpha_{13} = a_{21}a_{32}-a_{22}a_{31}\]
Así pues,
\[\det(A) = a_{11}(a_{22}a_{33}-a_{23}a_{32})-a_{12}(a_{21}a_{33}-a_{23}a_{31})+a_{13}(a_{21}a_{32}-a_{22}a_{31})\]
Lo obtenido anteriormente es exactamente lo que se obtiene con la Regla de Sarrus
4.1.1 Regla de Sarrus
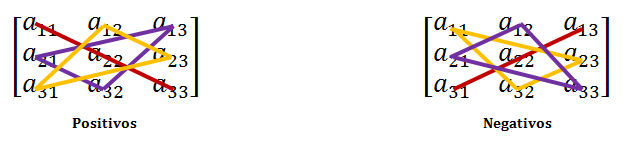
Básicamente lo que dice la imágen es:
\[\det(A) = a_{11}a_{22}a_{33}+a_{21}a_{32}a_{13}+a_{31}a_{12}a_{23}\] \[-a_{13}a_{22}a_{31}-a_{23}a_{32}a_{11}-a_{33}a_{12}a_{21}\]
Ejercicio 1
- En primer lugar, probad que es cierto para los casos particulares \(n = 2\) y \(n = 3\)
- Demostrad formalmente este resultado para el caso general
Debido a esto, tenemos las siguientes propiedades
4.2 Propiedades de los determinantes
Denotemos por \(\det(u_1,\dots,u_i,\dots,u_n)\) el determinante de \(A\in\mathcal{M}_n(\mathbb{K})\), la cual tiene por filas (o columnas) las matrices fila (o columna) \(u_i,\ i = 1,2,\dots,n\)
Ejemplo 3
\[\begin{vmatrix}1&2&1\\4&4&2\\10&4&1\end{vmatrix} = 2\begin{vmatrix}1&\mathbf{1}&1\\4&\mathbf{2}&2\\10&\mathbf{2}&1\end{vmatrix} = 4\begin{vmatrix}1&1&1\\\mathbf{2}&\mathbf{1}&\mathbf{1}\\10&2&1\end{vmatrix}\]
Ejemplo 4 \[\begin{vmatrix}1&0+3&-1\\2&2+2&3\\0&3+1&5\end{vmatrix} = \begin{vmatrix}1&0&-1\\2&2&3\\0&3&5\end{vmatrix}+\begin{vmatrix}1&3&-1\\2&2&3\\0&1&5\end{vmatrix}\]
Ejemplo 5
\[\begin{vmatrix}1 & 0 & -2\\2&3&0\\-1&1&0\end{vmatrix} = - \begin{vmatrix}-1 & 1 & 0\\2&3&0\\1&0&-2\end{vmatrix} = \begin{vmatrix}1 & -1 & 0\\3&2&0\\0&1&-2\end{vmatrix}\]
Ejercicio 2
Buscad vosotros mismos dos ejemplos cualesquiera, uno de orden 2 y otro de orden 3 y comprobad que, efectivamente, se cumple la propiedad enunciada
Ejercicio 3
Buscad vosotros mismos dos ejemplos cualesquiera, uno de orden 2 y otro de orden 3 y comprobad que, efectivamente, se cumple la propiedad enunciada
Si \(u_i =\sum_{k\ne i}a_ku_k\), entonces \(\det(u_1,\dots,u_i,\dots,u_n)=0\)
Ejemplo 6
\[\begin{vmatrix}1 & 2 & 3\\4 & 0 & 2\\ 5&2&5\end{vmatrix}=0\]
La última fila es el resultado de sumar las dos primeras.
Ejemplo 7
\[\begin{vmatrix}1 & 2 & 3\\4 & 0 & 2\\ 5&-1&0\end{vmatrix} = \begin{vmatrix}1 & 2 & 6\\4 & 0 & 6\\ 5&-1&4\end{vmatrix}\]
A la tercera columna le hemos sumado la primera y la segunda columnas.
4.3 Adjuntos y menores complementarios
Dada \(A = (a_{ij})_{n\times n},\ n\ge2\). Sea \(a_{ij}\) el elemento que ocupa la fila \(i\) y la columna \(j\) de la matriz \(A\). Si suprimimos la fila \(i\) y la columna \(j\) de \(A\) obtendremos una matriz cuadrada de orden \(n-1\)
Ejemplo 8
La matriz adjunta de \[A = \begin{pmatrix}1 & 0 & 5\\-1&3&2\\ 0 & -1 & 1\end{pmatrix}\] es
\[\text{Adj}(A) = \begin{pmatrix} \begin{vmatrix} 3 & 2\\ -1 & 1\end{vmatrix} & -\begin{vmatrix}-1 & 2\\ 0 & 1\end{vmatrix} & \begin{vmatrix}-1 & 3\\0 & -1\end{vmatrix}\\ -\begin{vmatrix}0 & 5\\ -1 & 1\end{vmatrix} & \begin{vmatrix}1 & 5\\ 0 & 1\end{vmatrix} & -\begin{vmatrix}1 & 0\\ 0 & -1\end{vmatrix}\\ \begin{vmatrix}0 & 5\\ 3 & 2\end{vmatrix} & -\begin{vmatrix}1 & 5\\-1 & 2\end{vmatrix} & \begin{vmatrix}1 & 0 \\ -1 & 3\end{vmatrix}\\ \end{pmatrix} = \begin{pmatrix}5 & 1 & 1\\ -5 & 1 & 1\\-15 & -7 & 3\end{pmatrix}\]
4.4 Cálculo de determinantes
El determinante de una matriz cuadrada \(A\in\mathcal{M}_n(\mathbb{K})\), \(n\ge2\) se puede calcular desarrollando por los adjuntos de los elementos de cualquiera de sus filas o columnas:
\[\det(A) = a_{i1}A_{i1}+a_{i2}A_{i2}+\cdots+a_{in}A_{in}\]
que es el desarrollo de un determinante por los adjuntos de los elementos de una fila; y también
\[\det(A) = a_{1j}A_{1j}+a_{2j}A_{2j}+\cdots+a_{nj}A_{nj}\]
que es el desarrollo de un determinante por los adjuntos de los elementos de una columna
Ejemplo 9
El determinante
\[\det(A) = \begin{vmatrix}1 & -1 & 3\\4 & 0 & 2\\ 5&-1&0\end{vmatrix}\]
desarrollado por los elementos de la primera fila es
\[|A| = 1\begin{vmatrix}0 & 2\\-1&0\end{vmatrix}-(-1)\begin{vmatrix}4&2\\5&0\end{vmatrix}+3\begin{vmatrix}4 & 0\\5 & -1\end{vmatrix} = 1\cdot 2+1\cdot(-10)+3\cdot(-4) = -20\]
y desarrollado por los elementos de la segunda columna es
\[|A| = -(-1)\begin{vmatrix}4&2\\5&0\end{vmatrix}+0\begin{vmatrix}1&3\\5&0\end{vmatrix}-(-1)\begin{vmatrix}1&3\\4&2\end{vmatrix} = 1\cdot (-10)+0+1\cdot(-10) = -20\]
Aplicando este último desarrollo a las matrices triangulares, tenemos que el determinante de una de estas matrices es igual al producto de los elementos de la diagonal principal.
Ejemplo 10
\[\det(A) = \begin{vmatrix}1 & 2 & 3 & 4\\ 0 & 5 & 6 & 7\\ 0 & 0 & 8 & 9\\ 0 & 0 & 0 & 10\end{vmatrix} = 1\begin{vmatrix}5 & 6 & 7\\ 0 & 8 & 9\\ 0 & 0 & 10\end{vmatrix} = 5\begin{vmatrix} 8 & 9\\ 0 & 10\end{vmatrix} = 40|10| = 400 \]
Lo que hemos hecho ha sido hacer un desarrollo por los adjuntos de la primera columna en cada paso
Ejemplo 11
A continuación os presentamos el determinante de Vandermonde de orden 4
\[\begin{vmatrix}1 & 1 & 1 & 1\\ a & b & c & d\\ a^2 & b^2 & c^2 & d^2\\ a^3 & b^3 & c^3 & d^3\end{vmatrix}\]
Con todo lo que hemos visto hasta ahora, podemos resolverlo de forma sencilla:
En primer lugar, realizamos \(f_4-af_3\)
\[\begin{vmatrix}1 & 1 & 1 & 1\\ a & b & c & d\\ a^2 & b^2 & c^2 & d^2\\ a^3 & b^3 & c^3 & d^3\end{vmatrix} = \begin{vmatrix}1 & 1 & 1 & 1\\ a & b & c & d\\ a^2 & b^2 & c^2 & d^2\\ 0 & b^3-ab^2 & c^3-ac^2 & d^3-ad^2\end{vmatrix}\]
A continuación, \(f_3-af_2\)
\[=\begin{vmatrix}1 & 1 & 1 & 1\\ a & b & c & d\\ 0 & b^2-ab & c^2-ac & d^2-ad\\ 0 & b^3-ab^2 & c^3-ac^2 & d^3-ad^2\end{vmatrix}\]
Ahora realizamos \(f_2-af_1\) y obtenemos
\[=\begin{vmatrix}1 & 1 & 1 & 1\\ 0 & b-a & c-a & d-a\\ 0 & b^2-ab & c^2-ac & d^2-ad\\ 0 & b^3-ab^2 & c^3-ac^2 & d^3-ad^2\end{vmatrix} =\begin{vmatrix}1 & 1 & 1 & 1\\ 0 & b-a & c-a & d-a\\ 0 & b(b-a) & c(c-a) & d(d-a)\\ 0 & b^2(b-a) & c^2(c-a) & d^2(d-a)\end{vmatrix}\]
El siguiente paso es desarrollar por la primera columna
\[ = 1\begin{vmatrix}b-a & c-a & d-a\\ b(b-a) & c(c-a) & d(d-a)\\ b^2(b-a) & c^2(c-a) & d^2(d-a)\end{vmatrix} = (b-a)(c-a)(d-a)\begin{vmatrix}1 & 1& 1\\b & c & d\\ b^2&c^2&d^2\end{vmatrix}\]
Hemos obtenido un determinante de Vandermonde de orden 3. Lo que implica seguir el mismo razonamiento anterior:
Empezamos realizando \(f_3-bf_2\)
\[(b-a)(c-a)(d-a)\begin{vmatrix}1 & 1& 1\\b & c & d\\ b^2&c^2&d^2\end{vmatrix} = (b-a)(c-a)(d-a)\begin{vmatrix}1 & 1& 1\\b & c & d\\ 0&c^2-bc&d^2-bd\end{vmatrix}\]
A continuación, \(f_2-bf_1\)
\[= (b-a)(c-a)(d-a)\begin{vmatrix}1 & 1& 1\\0 & c-b & d-b\\ 0&c^2-bc&d^2-bd\end{vmatrix}\]
Finalmente, desarrollando de nuevo por la primera columna y sacando factor común \((c-b)\) y \((d-b)\) de las dos últimas columnas obtenemos:
\[\det(A) = (b-a)(c-a)(d-a)(c-b)(d-b)\begin{vmatrix}1 & 1\\ c & d\end{vmatrix} = (b-a)(c-a)(d-a)(c-b)(d-b)(d-c)\]
4.5 Aplicaciones en el cálculo de matrices y sistemas
Los determinantes sirven para facilitar el cálculo con matrices y en la resolución de sistemas
- \(A\) es invertible si, y solo si, \(\det(A)\ne 0\)
- \(\det(AB) = \det(A)\det(B)\)
- si \(\det(A)\ne 0\), entonces \(\det(A^{-1}) = \frac{1}{\det(A)}\)
- si \(\det(A)\ne 0\), entonces \(A^{-1} = \frac{(\text{Adj}(A))^t}{\det(A)}\)
Ejemplo 12
Calculemos la inversa de la matriz \[A = \begin{pmatrix}1 & 0 & -1\\ 0 & -3 & 5\\ 2 & -2 & 0\end{pmatrix}\]
En primer lugar, calculemos el determinante de \(A\) y veamos si es nulo o no. Por la Regla de Sarrus,
\[\det(A) = 0 + 0 + 0 -(6-10+0) = 4\ne 0\]
Con lo cual, sabemos que \(A\) es invertible. Procedamos a calcular su inversa. En primer lugar, calculemos la matriz adjunta:
\[A_{11} = \begin{vmatrix}-3 & 5\\-2 & 0\end{vmatrix} = 10\qquad A_{12} = -\begin{vmatrix}0 & 5\\2 & 0\end{vmatrix} = 10\qquad A_{13} = \begin{vmatrix}0 & -3\\2 & -2\end{vmatrix}=6\] \[A_{21} = -\begin{vmatrix}0 & -1\\-2 & 0\end{vmatrix} = 2\qquad A_{22} = \begin{vmatrix}1 & -1\\ 2 & 0\end{vmatrix} = 2\qquad A_{23} = -\begin{vmatrix}1 & 0\\ 2 & -2\end{vmatrix} = 2\] \[A_{31} = \begin{vmatrix}0 & -1\\-3 & 5\end{vmatrix} = -3\qquad A_{32} = -\begin{vmatrix}1 & -1\\0 & 5\end{vmatrix} = -5\qquad A_{33} = \begin{vmatrix}1 & 0\\0 & -3\end{vmatrix} = -3\]
Por tanto, \[\text{Adj}(A) = \begin{pmatrix}10 & 10 & 6\\ 2 & 2 & 2\\ -3 & -5 & -3\end{pmatrix}\]
Ahora, su transpuesta es
\[(\text{Adj}(A))^t = \begin{pmatrix}10 & 2 & -3\\ 10 & 2 & -5\\ 6 & 2 & -3\end{pmatrix}\]
Finalmente, \[A^{-1} = \frac{1}{\det(A)}(\text{Adj}(A))^t = \frac{1}{4}\begin{pmatrix}10 & 2 & -3\\ 10 & 2 & -5\\ 6 & 2 & -3\end{pmatrix} = \begin{pmatrix}\frac{5}{2} & \frac{1}{2} & -\frac{3}{4}\\ \frac{5}{2} & \frac{1}{2} & -\frac{5}{4}\\ \frac{3}{2} & \frac{1}{2} & -\frac{3}{4}\end{pmatrix}\]
Otra aplicación de los determinantes se encuentra en el cálculo del rango de una matriz:
Dada \(A\in\mathcal{M}_{m\times n}(\mathbb{K})\) y sea \(k<m,n\)
Se pueden utilizar dichos menores para calcular el rango de una matriz \(A\) cualquiera:
En otras palabras, el rango de la matriz \(A\) coincide con el orden del mayor menor no nulo obtenido a partir de \(A\).
Otra forma de enunciar el Teorema anterior es la siguiente:
Ejemplo 13
Calculemos el rango de la matriz \[A = \begin{pmatrix}4 & 3 & 2 & -1 & -2\\ 7 & 5 & 4 & -2 & 1\\ 2 & 1 & 1 & -1 & 8\end{pmatrix}\]
El mayor menor de la matriz \(A\) es de orden 3. De hecho, esta matriz tiene \({5\choose 3} = 10\) menores de orden \(3\) diferentes. Veamos si alguno de ellos es no nulo:
\[(c_1,c_2,c_3) = \begin{vmatrix}4 & 3 & 2\\ 7 & 5 & 4\\ 2 & 1 & 1\end{vmatrix} = 20 +14+24-(20+16+21) = 1\ne 0\]
Como este menor de orden 3 ya no es nulo, por el Teorema anterior concluimos que la matriz tiene rango 3.
Ejercicio 4. Calcular el rango de la matriz \[A = \begin{pmatrix} 0 & 1 & -1\\ 4 & -2 & -6\\ -1 & 1 & 1\\ 2 & -2 & -2\end{pmatrix}\]
Otra aplicación muy útil de los determinantes es la de resolver sistemas de ecuaciones lineales.
Dado el sistema \(AX = b\) en su expresión matricial, siendo éste un sistema de \(n\) ecuaciones con \(n\) incógnitas \(x_1,\dots,x_n\). Sabemos que si \(\det(A)\ne 0\) este sistema tiene solución única dada por \(X = A^{-1}b\).
En estos casos, otra forma de encontrar esta solución única es a través de la
Ejemplo 14
Consideremos el sistema \(AX = b\) dado por \[A = \begin{pmatrix} 1 & 1 & 1\\ -1 & 0 & 1\\ -1 & -1 & 0\end{pmatrix}\qquad X = \begin{pmatrix}x_1\\x_2\\x_3\end{pmatrix}\qquad b = \begin{pmatrix}1\\ 0\\ -1\end{pmatrix}\]
Podemos comprobar fácilmente que
\[\det(A) = \begin{vmatrix} 1 & 1 & 1\\ -1 & 0 & 1\\ -1 & -1 & 0\end{vmatrix} = 1\ne 0\]
Por tanto, tenemos un sistema de Cramer con solución única dada por
\[x_1 = \frac{\begin{vmatrix} 1 & 1 & 1\\ 0 & 0 & 1\\ -1 & -1 & 0\end{vmatrix}}{|A|} = \frac{0}{1} = 0\]
\[x_2 = \frac{\begin{vmatrix} 1 & 1 & 1\\ -1 & 0 & 1\\ -1 & -1 & 0\end{vmatrix}}{|A|} = \frac{1}{1} = 1\]
\[x_3 = \frac{\begin{vmatrix} 1 & 1 & 1\\ -1 & 0 & 0\\ -1 & -1 & -1\end{vmatrix}}{|A|} = 0\]
Con lo cual, nuestra solución es \[X = \begin{pmatrix}0\\1\\0\end{pmatrix}\]
Ejercicio 5
Demostrar que el sistema \(AX = b\) dado por
\[A = \begin{pmatrix} 1 & 1 & 1\\ -1 & 0 & 1\\ -1 & -1 & 0\end{pmatrix}\qquad X = \begin{pmatrix}x_1\\x_2\\x_3\end{pmatrix}\qquad b = \begin{pmatrix}\alpha\\ \beta\\ \gamma\end{pmatrix}\]
con \(\alpha,\beta,\gamma\in\mathbb{R}\) tiene solución única y calcular dicha solución haciendo uso del Método de Cramer.
La regla de Cramer también sirve en el caso de sistemas compatibles indeterminados.
Lo que se debe hacer en estos casos es encontrar un menor no nulo que nos dé el rango del sistema y la submatriz el sistema correspondiente a este menor es una matriz cuadrada invertible a la que se le puede aplicar el Método de Cramer.
Entonces, las ecuaciones no correspondientes a este menor las podemos eliminar, pues son prescindibles.
De este modo, el sistema con las incógnitas principales y solo las ecuaciones correspondientes al menor no nulo, tiene solución única dada por el Método de Cramer en función de las incógnitas secundarias.
Ejemplo 15
Consideremos el sistema \(AX = b\) donde \[A = \begin{pmatrix} 12 & 6 & 8\\ 4 & 2 & 4\\ -8 & -4 & -4 \end{pmatrix}\qquad X = \begin{pmatrix} x\\ y\\ z\end{pmatrix}\qquad b = \begin{pmatrix} 1\\ 2\\ 1\end{pmatrix}\]
Es fácil comprobar que \[\det(A) = \begin{vmatrix} 12 & 6 & 8\\ 4 & 2 & 4\\ -8 & -4 & -4 \end{vmatrix} = 0\]
ya que la primera columna es el doble de la segunda.
Por este motivo, consideremos el menor de orden 2 formado por las dos primeras filas y las dos últimas columnas:
\[\begin{vmatrix} 6 & 8\\2 & 4 \end{vmatrix} = 8\ne 0\]
Orlando este menor con la columna de los términos independientes, lo que obtenemos es \[\begin{vmatrix} 6 & 8 & 1\\2 & 4 & 2\\ -4 & -4 & 1 \end{vmatrix} = 0\]
Por lo tanto, concluimos que \(rg(A) = 2\). Además, tenemos que el sistema es compatible indeterminado.
Así pues, las incógnitas principales serán \(y,z\) porque recordemos que el menor de orden 2 no nulo está formado por las dos últimas columnas de \(A\).
Por otro lado, la tercera ecuación, al no haberla considerado en el menor de orden 2, ya no nos es necesaria. Así, nuestro sistema lo podemos reescribir como
\[\left\{\begin{matrix} 12x&+&6y&+&8z&=&1\\ 4x&+&2y&+&4z&=&2 \end{matrix} \right.\]
o, equivalentemente,
\[\left\{\begin{matrix} 6y&+&8z&=&1-12x\\ 2y&+&4z&=&2-4x \end{matrix} \right.\]
que es un sistema de Cramer de \(A'X' = b'\) con
\[A' = \begin{pmatrix} 6 & 8\\ 2 & 4 \end{pmatrix}\qquad X' = \begin{pmatrix} y\\ z\end{pmatrix}\qquad b' = \begin{pmatrix} 1-12x\\ 2-4x\end{pmatrix}\]
Y este sistema tiene solución única en función de \(x\) dada por
\[y = \frac{\begin{vmatrix}1-12x & 8\\ 2-4x & 4\end{vmatrix}}{8} = \frac{-16x-12}{8} = -2x-\frac{3}{2}\qquad z = \frac{\begin{vmatrix}6 & 1-12x\\ 2 & 2-4x\end{vmatrix}}{8} = \frac{10}{8}=\frac{5}{4}\]
De este modo, nuestra solución es \(X = \begin{pmatrix}x\\ -2x-\frac{3}{2}\\ \frac{5}{4}\end{pmatrix}\) con \(x\in\mathbb{R}\)
A la hora de calcular el rango de una matriz, calcular la inversa de una matriz regular o de resolver un sistema de ecuaciones lineales podemos hacerlo de dos formas:
- A través de transformaciones lineales
- Utilizando determinantes
La primera tiene la ventaja de la implementación en ordenadores ya que requiere de muchas menos operaciones.
En cambio, los determinantes permiten más flexibilidad en las operaciones, la cual es de agradecer cuando el estudio a hacer depende de uno o más parámetros.
Ejercicio 6
Estudiar el siguiente sistema según los valores del parámetro \(a\in\mathbb{R}\)
\[\left\{\begin{matrix}ax &+&y&+&z&=&1\\ x &+&ay&+&z&=&1\\ x &+&y&+&az&=&1\\ \end{matrix}\right.\]